Arm-Z Modular Manipulator




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
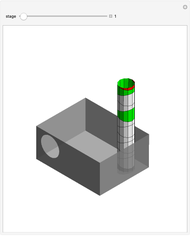
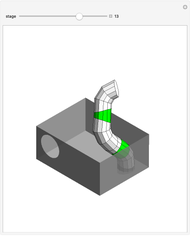
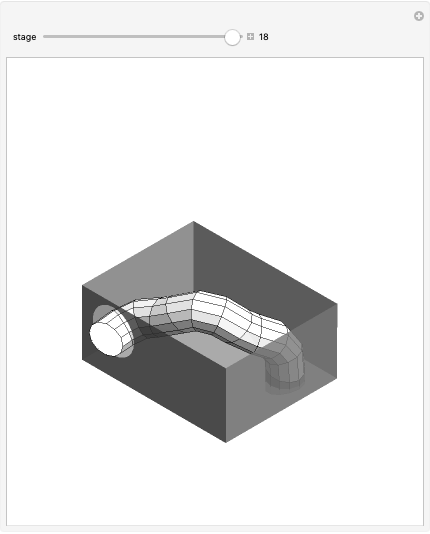
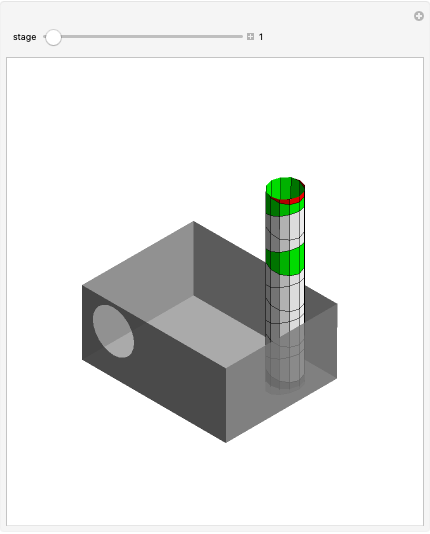
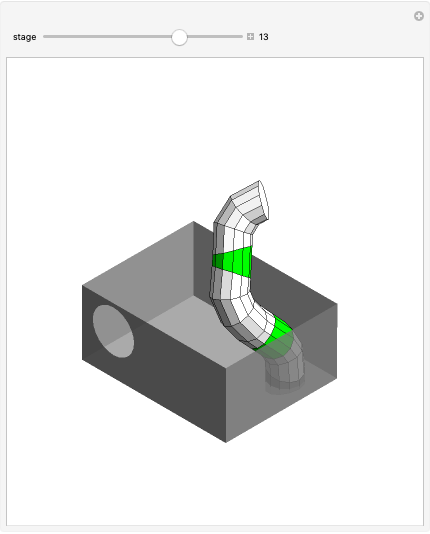
Arm-Z is a conceptual manipulator composed of congruent modules each having one degree of freedom (1-DOF) – a relative twist. Simple changes of these twists result in emerging behavior of the entire Arm-Z allowing it to perform complex movements.
[more]
Contributed by: Machi Zawidzki (April 2019)
Open content licensed under CC BY-NC-SA
Snapshots

Details
Reference
[1] M. Zawidzki and J. Szklarski, "Transformations of Arm-Z Modular Manipulator with Particle Swarm Optimization," Advances in Engineering Software, 126, 2018 pp. 147–160. doi:10.1016/j.advengsoft.2018.05.003.
[2] M. Zawidzki, "Deployable Pipe-Z", Acta Astronautica, 127, 2016 pp. 20–30. doi.org/10.1016/j.actaastro.2016.05.023.
This work was completed as part of the project titled: "Innovative Extremely Modular Systems for temporary and permanent deployable structures and habitats: development, modeling, evaluation & optimization". It was funded by "Polonez 2" research grant no. 2016/21/P/ST8/03856 supported by the National Science Centre, Poland.
This project has received funding from the European Unions Horizon 2020 research and innovation programme under the Marie Sklodowska–Curie grant agreement No 665778.
Permanent Citation
 Snake-Arm Robot
Snake-Arm Robot
Sándor Kabai Fractal Robot Arm
Fractal Robot Arm
Sándor Kabai Model of an Industrial Robot Arm
Model of an Industrial Robot Arm
Karl Scherer End Effector Trajectory Tracking for Planar Linkage
End Effector Trajectory Tracking for Planar Linkage
Tushar Mollik and Edmon Perkins Probabilistic Models for Robot Motion
Probabilistic Models for Robot Motion
Aaron T. Becker and Renuka Pakeetharan Inverse Kinematics
Inverse Kinematics
Rob Lockhart Hand Model
Hand Model
Sándor Kabai Forward Kinematics
Forward Kinematics
Rob Lockhart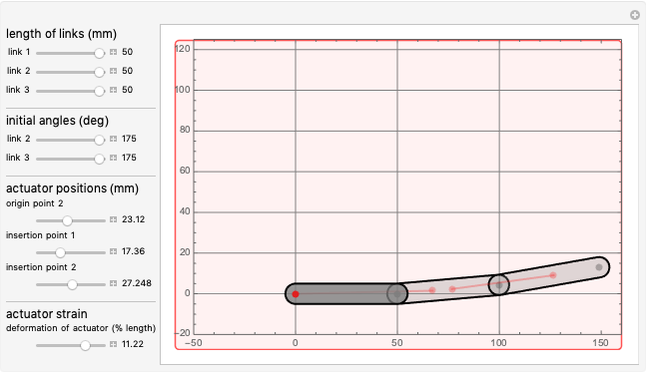 Effects of Deformation on Actuated Joints
Effects of Deformation on Actuated Joints
Scott Kennedy and Edmon Perkins Isochrons for a Dubins Car
Isochrons for a Dubins Car
Aaron T. Becker and Shiva Shahrokhi