Common Robot Arm Configurations

Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
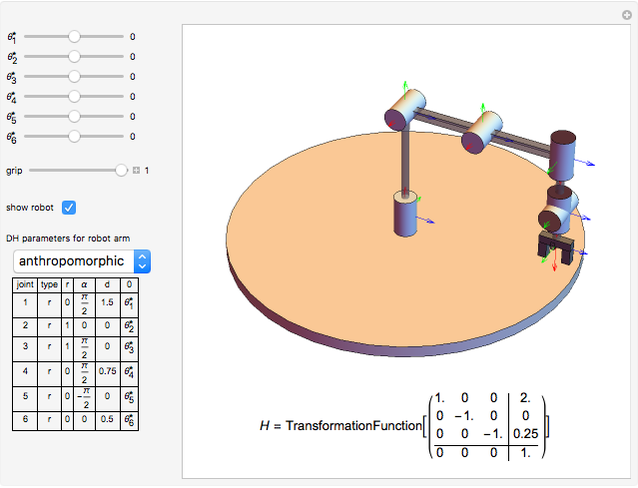
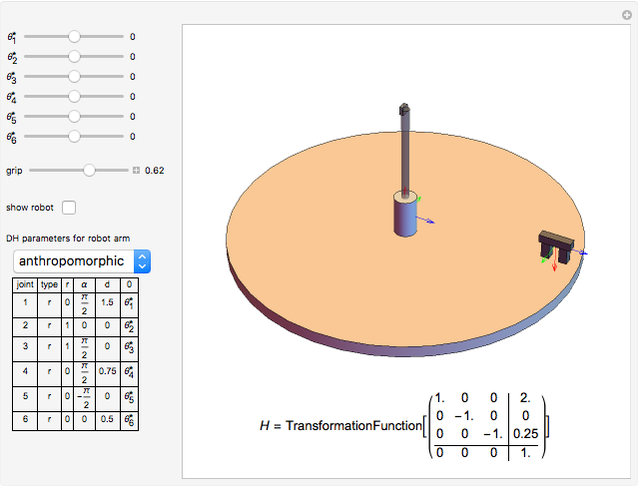
Robot manipulators can be concisely described by a convention called the Denavit–Hartenberg parameters (DH parameters) to assign one variable and three parameters to describe the distance and angular offset between each joint. This Demonstration allows you to choose an arbitrary robot specified by DH parameters and animate the degrees of freedom.
Contributed by: Mohammad Sultan and Aaron T. Becker (June 2017)
Open content licensed under CC BY-NC-SA
Snapshots
Details
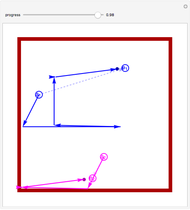
This Demonstration creates a serial-link robot arm with some common configurations. You can manipulate each joint using the sliders.
Degrees of freedom (DOF) is the number of joints that the robot has. The DOF is equal to the dimension of the robot's configuration space.
The DH parameters are link length  , link twist
, link twist  , link offset
, link offset  and joint angle
and joint angle  . These four parameters are associated with link
. These four parameters are associated with link  and joint
and joint  .
.
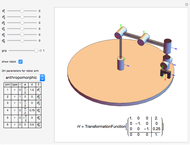
Snapshot 1: arm with default values
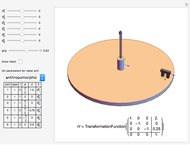
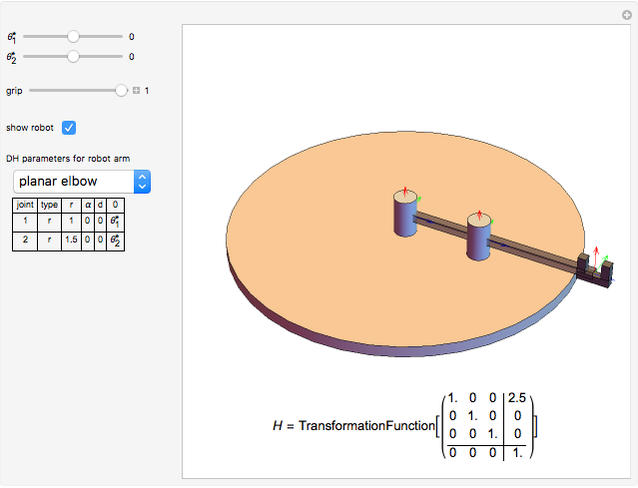
Snapshot 2: arm after changing grip value and turning off "show robot"
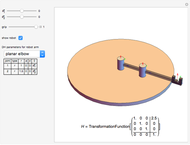
Snapshot 3: planar elbow robot arm
Snapshot 4: elbow robot arm
Snapshot 5: CNC robot arm
References
[1] J. Nethery, M. W. Spong, M. Sultan and A. T. Becker. "Robotica." (Jun 27, 2017) github.com/RoboticSwarmControl/robotica.
[2] M. W. Spong, S. Hutchinson and M. Vidyasagar, Robot Modeling and Control, Hoboken: John Wiley and Sons, 2006.
Permanent Citation
"Common Robot Arm Configurations"
http://demonstrations.wolfram.com/CommonRobotArmConfigurations/
Wolfram Demonstrations Project
Published: June 28 2017
 Snake-Arm Robot
Snake-Arm Robot
Sándor Kabai Fractal Robot Arm
Fractal Robot Arm
Sándor Kabai Kinematics of a Redundant Anthropomorphic Arm with Seven Degrees of Freedom
Kinematics of a Redundant Anthropomorphic Arm with Seven Degrees of Freedom
Frederick Wu Robot Builder
Robot Builder
Frank Liao Inverse Kinematics in Redundant Robot Manipulator
Inverse Kinematics in Redundant Robot Manipulator
André Carvalho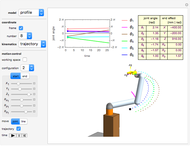 Joint Space and Tooling Space for Robot Motion Control
Joint Space and Tooling Space for Robot Motion Control
Frederick Wu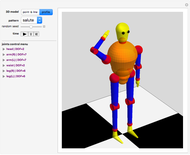 Forward Kinematics of Humanoid Robots
Forward Kinematics of Humanoid Robots
Frederick Wu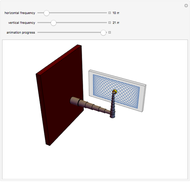 Robotics Application of Lissajous Curves
Robotics Application of Lissajous Curves
Francisco Velázquez Robot Manipulator Workspaces
Robot Manipulator Workspaces
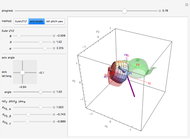
Aaron T. Becker, Benedict Isichei, Muhammad Sultan and Maruthi S. Chemudupati Manipulability Ellipsoid of a Robot Arm
Manipulability Ellipsoid of a Robot Arm
Aaron T. Becker and Mary Burbage
-
 Distribution of a Swarm of Robots in a Circular Workplace under Gravity
Distribution of a Swarm of Robots in a Circular Workplace under Gravity
Aaron T. Becker -
Robot Manipulator Workspaces
Aaron T. Becker -
 The Homicidal Chauffeur Problem
The Homicidal Chauffeur Problem
Aaron T. Becker -
 Rapidly Exploring Random Tree (RRT) and RRT*
Rapidly Exploring Random Tree (RRT) and RRT*
Aaron T. Becker -
 Configuration Space for Four-Bar Linkage
Configuration Space for Four-Bar Linkage
Aaron T. Becker -
 Isochrons for a Dubins Car
Isochrons for a Dubins Car
Aaron T. Becker -
 Shortest Path for the Dubins Car
Shortest Path for the Dubins Car
Aaron T. Becker -
 Distance Norms in Robot Workspace and Phase Space
Distance Norms in Robot Workspace and Phase Space
Aaron T. Becker -
 Breadth-First Search Robot Motion Planning
Breadth-First Search Robot Motion Planning
Aaron T. Becker -
 Spreading Particles in a Disk
Spreading Particles in a Disk
Aaron T. Becker -
 Shortest Path between Two Points in the Unit Disk Reflecting off the Circumference
Shortest Path between Two Points in the Unit Disk Reflecting off the Circumference
Aaron T. Becker -
 Three Parametrizations of Rotations
Three Parametrizations of Rotations
Aaron T. Becker -
 Moving Two Particles with Shared Control Inputs Using Wall Friction
Moving Two Particles with Shared Control Inputs Using Wall Friction
Aaron T. Becker -
 Compression Ratio of Spheres in a Curved Tube
Compression Ratio of Spheres in a Curved Tube
Aaron T. Becker -
 Common Robot Arm Configurations
Common Robot Arm Configurations
Aaron T. Becker -
 Distribution of a Robot Swarm in a Square under Gravity
Distribution of a Robot Swarm in a Square under Gravity
Aaron T. Becker -
 Transmitting Force through a Tube Filled with Spheres and Spacers
Transmitting Force through a Tube Filled with Spheres and Spacers
Aaron T. Becker -
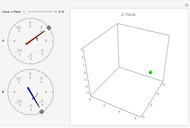 Chart for a Torus
Chart for a Torus
Aaron T. Becker -
 Defects in an Optical Fiber
Defects in an Optical Fiber
Aaron T. Becker -
 Synthesis with Even and Odd Functions
Synthesis with Even and Odd Functions
Aaron T. Becker