Approximating Ackermann Steering Geometry with a Trapezoidal Linkage




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
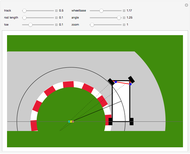
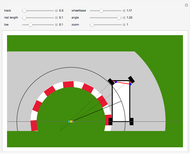
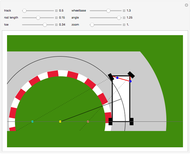
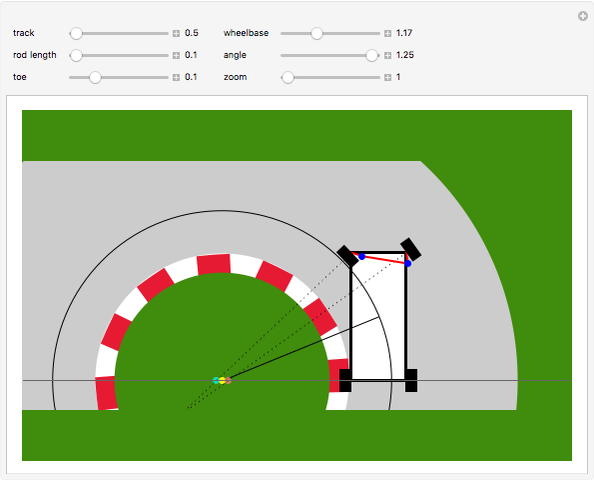
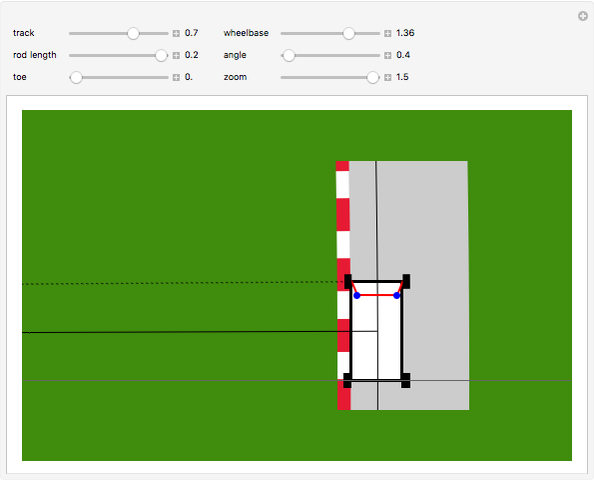
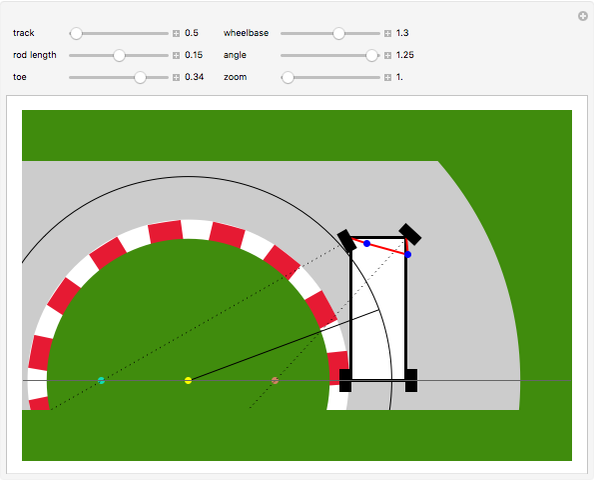
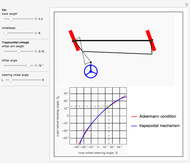
Ackermann geometry is a theoretical model for a steering system that has zero slip. It is achieved when all four wheels of a car are perpendicular to the same turning circle center. This Demonstration uses a common approximation for Ackermann geometry: a simple three-bar linkage. The linkage is arranged in a trapezoid so that the wheel on the inside of a turn will angle more than the outside wheel.
[more]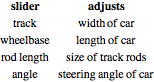
Contributed by: David Askins-Gast (July 2013)
(Mathematica Summer Camp 2013)
Open content licensed under CC BY-NC-SA
Snapshots
Details
Reference
[1] Wikipedia. "Ackermann Steering Geometry." (Jul 23, 2013) en.wikipedia.org/wiki/Ackermann_steering_geometry.
 Car Steering with a Trapezoidal Mechanism
Car Steering with a Trapezoidal Mechanism
Erik Mahieu Piston Linkage
Piston Linkage
Michael Schreiber Watt's Lemniscoidal Linkage
Watt's Lemniscoidal Linkage
Erik Mahieu Walking Mechanism Using a Klann Linkage
Walking Mechanism Using a Klann Linkage
Erik Mahieu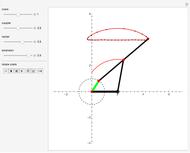 Coupler Curves of a Four-Bar Linkage
Coupler Curves of a Four-Bar Linkage
Erik Mahieu Configuration Space for Four-Bar Linkage
Configuration Space for Four-Bar Linkage
Aaron T. Becker and Shiva Shahrokhi Five-Bar Linkage Model of the Bicycle-Rider System
Five-Bar Linkage Model of the Bicycle-Rider System
Erik Mahieu Coupler Curve Atlas for the Four-Bar Linkage
Coupler Curve Atlas for the Four-Bar Linkage
Erik Mahieu Inversive Geometry II: The Peaucellier Inversor Mechanism
Inversive Geometry II: The Peaucellier Inversor Mechanism
Jaime Rangel-Mondragon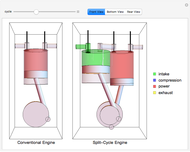 Scuderi Split Cycle Engine
Scuderi Split Cycle Engine
Raymond Yuan